

Chạy OpMode
Nếu bạn đã xây dựng và cài đặt thành công ứng dụng Android cập nhật với OpMode mới, bạn đã sẵn sàng để chạy OpMode. Xác minh rằng Driver Station vẫn được kết nối với Robot Controller. Vì bạn đã chỉ định OpMode mẫu là một OpMode điều khiển từ xa, nó sẽ được liệt kê trong danh sách các OpMode TeleOp.
Trên Driver Station, sử dụng điều khiển danh sách thả xuống TeleOp để hiển thị danh sách các OpMode có sẵn. Chọn OpMode của bạn (MyFIRSTJavaOpMode) từ danh sách.


Nhấn nút INIT để khởi tạo OpMode.


OpMode sẽ thực thi các câu lệnh trong phương thức runOpMode cho đến câu lệnh waitForStart. Sau đó, nó sẽ đợi cho đến khi bạn nhấn nút bắt đầu (biểu tượng hình tam giác) để tiếp tục.Khi bạn nhấn nút bắt đầu, OpMode sẽ tiếp tục lặp lại và gửi thông điệp “Status: Running” đến Driver Station. Để dừng OpMode, nhấn nút dừng có hình vuông.


Chỉnh sửa OpMode để điều khiển động cơ
Hãy chỉnh sửa OpMode của bạn để điều khiển động cơ DC đã được kết nối và cấu hình cho REV Robotics Control Hub hoặc REV Robotics Expansion Hub. Thay đổi mã cho vòng lặp chương trình để nó trông như sau:

Nếu bạn xem xét đoạn mã được thêm vào, bạn sẽ thấy rằng chúng ta đã định nghĩa một biến mới có tên là targetPower trước khi vào vòng lặp while.

Ở đầu vòng lặp while, chúng ta đặt biến tgtPower bằng giá trị âm của cần điều khiển trái trên gamepad1:

Đối tượng gamepad1 có sẵn để bạn sử dụng trong phương thức runOpMode. Nó đại diện cho trạng thái của gamepad số 1 trên Driver Station. Lưu ý rằng với các gamepad F310 được sử dụng trong cuộc thi, giá trị Y của cần điều khiển dao động từ -1 khi cần ở vị trí cao nhất, đến +1 khi cần ở vị trí thấp nhất. Trong đoạn mã ví dụ trên, bạn đảo dấu giá trị left_stick_y để khi đẩy cần điều khiển trái về phía trước, động cơ sẽ nhận được công suất dương. Lưu ý rằng trong ví dụ này, khái niệm tiến và lùi của động cơ là tương đối. Tuy nhiên, việc đảo dấu giá trị y của cần điều khiển có thể rất hữu ích trong thực tế.

Bộ câu lệnh tiếp theo đặt công suất của motorTest thành giá trị được biểu thị bởi biến tgtPower. Các giá trị cho công suất mục tiêu và công suất thực tế của động cơ sau đó được thêm vào tập hợp dữ liệu sẽ được gửi qua cơ chế telemetry đến Driver Station.

Sau khi bạn đã chỉnh sửa OpMode để bao gồm các câu lệnh mới, nhấn nút Build và xác minh rằng OpMode đã được xây dựng thành công.
Chạy OpMode với Gamepad được kết nối
OpMode của bạn nhận đầu vào từ gamepad và sử dụng đầu vào này để điều khiển động cơ DC. Để chạy OpMode, bạn cần kết nối một gamepad Logitech F310 hoặc gamepad được phê duyệt khác với Driver Station.
Kết nối gamepad với Driver Station. Nếu sử dụng REV Robotics Driver Hub, bạn có thể kết nối trực tiếp gamepad vào một trong các cổng USB-A. Trên điện thoại
DRIVER STATION, bạn sẽ cần một cáp chuyển Micro USB OTG.

OpMode mẫu của bạn sẽ tìm đầu vào từ gamepad được chỉ định là người dùng hoặc người lái số 1. Nhấn đồng thời nút Start và nút A trên bộ điều khiển Logitech F310 để chỉ định gamepad là người dùng số 1. Lưu ý rằng nhấn đồng thời nút Start và nút B sẽ chỉ định gamepad là người dùng số 2. Trên gamepad kiểu PS4, sử dụng nút Options và Cross cho người dùng số 1, hoặc Options và Circle cho người dùng số 2.


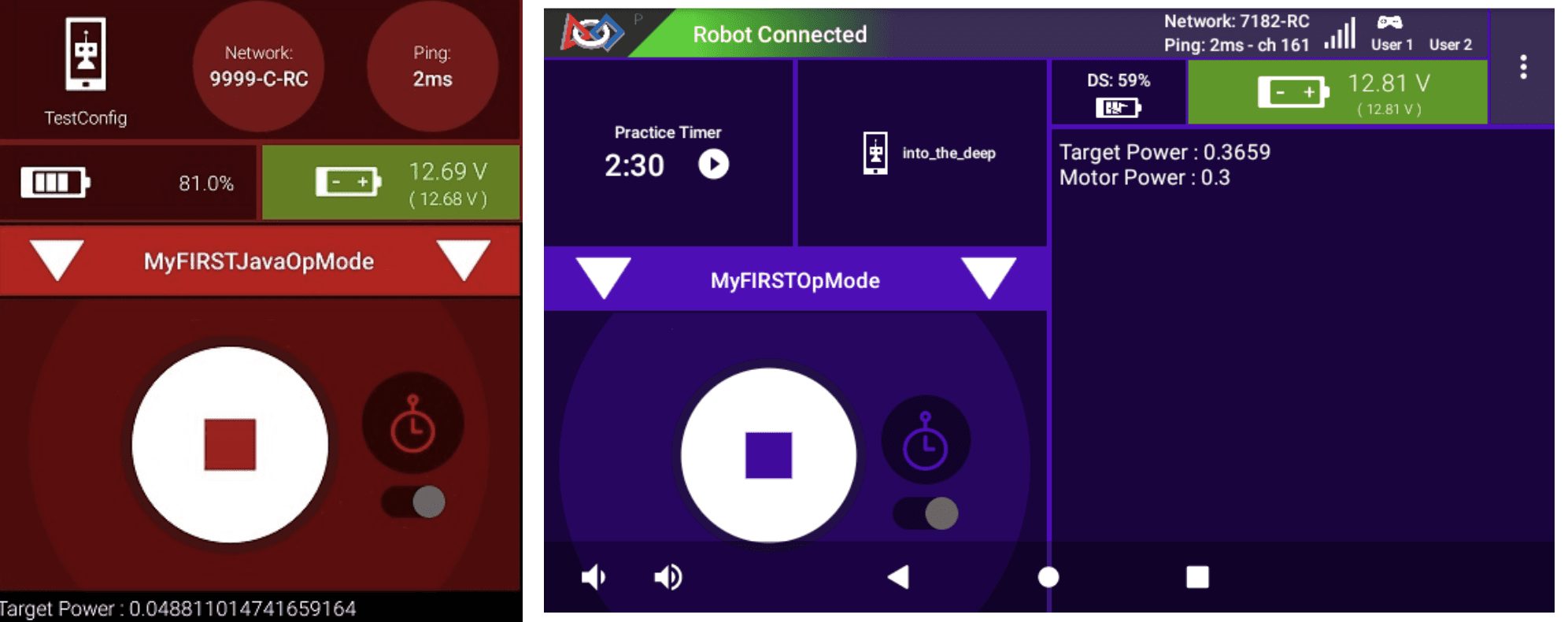
Nếu bạn đã chỉ định gamepad là người dùng số 1 thành công, bạn sẽ thấy một biểu tượng gamepad nhỏ phía trên dòng chữ “User 1” ở góc trên bên phải của màn hình Driver Station. Mỗi khi có hoạt động trên gamepad số 1, biểu tượng này sẽ được làm nổi bật màu xanh lá cây. Nếu biểu tượng không xuất hiện hoặc không sáng màu xanh khi bạn sử dụng gamepad, thì có vấn đề với kết nối gamepad.
Chọn, khởi tạo và chạy OpMode MyFIRSTJavaOpMode của bạn.
Nếu bạn đã cấu hình gamepad đúng cách, cần điều khiển trái sẽ điều khiển chuyển động của động cơ. Khi chạy OpMode, hãy cẩn thận và đảm bảo không để bất kỳ vật gì bị kẹt trong động cơ đang quay. Lưu ý rằng biểu tượng gamepad người dùng số 1 sẽ sáng màu xanh mỗi khi bạn di chuyển cần điều khiển. Ngoài ra, các giá trị công suất mục tiêu và công suất thực tế của động cơ sẽ được hiển thị trong khu vực telemetry trên Driver Station
ADUDU

A proud team of passionate Robotics Enthusiasts competing in nation-wide Technology competitions in Vietnam, the FIRST Tech Challenge and the FIRST Robotics Competition.
navigation
social
media
contacts
Tech Specific
For Collaborations Enquiry
Made by aDudu's Programming Department